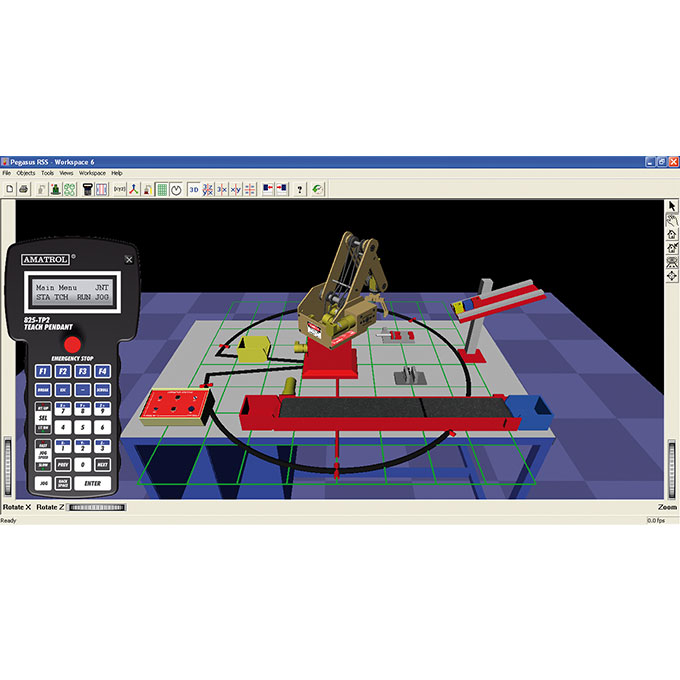
Simulação virtual do “Pegasus Servo Robô Articulado” em modo off-line, sem a necessidade de conectar o servo robô articulado para tal simulação.
Linguagem de programação compatível com a linguagem de programação do robô Pegasus ou Saturn.
Capacidade de transferência de programas de simulação para os robôs.
Permite ao mesmo tempo a visualização em três diferentes vistas da simulação em 3-D bem como as informações das coordenadas e sequência de programa. Simulação de status de entradas e saídas digitais virtuais em conformidade com o painel de entradas e saída do controlador do robô.
Inclusão de objetos virtuais na área de trabalho do Robô e todos os componentes descritos na célula de trabalho flexível tais como: mesa de trabalho, módulo de inspeção, torno CNC, esteiras, alimentadores, sensores de presença, chaves pushbutton e etc.